


目前,国内中小水产养殖场喂料大部分采用人工抛料的方式,但人工抛料不能保证喂料的均匀性,而且劳动强度大,甚至造成饲料浪费、污染水质、影响养殖对象的生长发育,增加养殖成本[1-2]。在饲料投饲装备研发和应用方面,西方发达国家比我国发展早,技术也更先进,如美国ETI公司研发的具有高精度、高可靠性和大容量的Feedmaster投饲系统,芬兰Arvo-Tec公司研发的机器人投饲系统,日本Nitto Seiko公司研发的具有先进水平的小料仓投喂模式系统等,在这些国家,自动投饲设备应用已经比较普遍[3]。而在我国整体饲料机械行业技术研发比较薄弱的大背景下[4-5],国内有一些公司开始投入到投饲系统的研究和生产,如南京渔联网科技有限公司的智能投料机、广州中浪科技有限公司的管道投料机、浙江富地机械有限公司的工厂化养殖投饲系统等。同时,国内相关行业专家也在不断尝试开发自动投饲设备。胡昱等研发出深水网箱自动投饲系统,通过可编程逻辑控制器(Programmable logic controller,PLC)控制继电接触器来控制各个设备的启动、停止,动态定时、定点及定量的投饲,实现精确投饲[6]。田应平等设计了一套适用于室内工厂化养殖的自动投饲系统,该系统具有监测报警、自动投饲等功能,实现了饲料的全天候实时自动投放以及远程监控[7]。汪万里等研发了新型对虾养殖投饲装置,采用轮式的移动方案,实现了移动过程中进行投喂的功能,克服了当前对虾养殖过程中人工投饲的缺陷[8]。
综上,国外的设备先进,但价格昂贵;国内的研究大多是针对单一的中大型养殖场,而国内中小养殖户一般都有多个中小养殖池塘,同时购买多套国产设备成本过高,以致于目前很多中小养殖户仍采用人工投料的方式。本项目针对当前中小养殖户的现状,设计了一套以PLC技术为基础的饲料集中供应系统。该系统主要包含饲料供料、输送、集中分配、抛料和监控等系统,通过集中供料、多路配送,可实现向多个养殖池塘(本文所写的池塘是指可养殖各类水产品的场所)进行长距离、大容量的投饲。使用该系统,操作人员只要在控制室内就可以进行投饲操作以及远程监控。该系统的投入使用,对广大中小养殖户而言,成本是适中的,不仅可以减少对水产技术管理人员的依赖,减轻管理人员的劳动强度,还能提高生产效率。
1 饲料集中供应系统总体设计
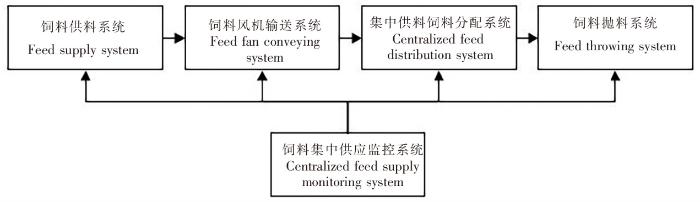
饲料供应系统作为智慧养殖业的一个子系统,主要作用是将饲料高效、低成本地输送到池塘相应区域。为实现该目的,本项目设计了饲料集中供应系统,由5个子系统组成,如图1所示,分别是:1)饲料供料系统;2)饲料风机输送系统;3)集中供料饲料分配系统;4)饲料抛料系统;5)饲料集中供应监控系统。其工作原理是风机输送系统提供气体动力,料仓装置中的饲料经供料装置进入管道,风机输送系统产生的高速空气流在供料装置出口附近产生一个负压区,在负压及加速气流的作用下,气流和饲料颗粒的混合物通过分配系统出料口进入输送管道并被输送到养殖池塘。分配装置通过监控系统控制旋转以达到不同的出料口,每个出料口通向不同的养殖池塘的抛料系统,从而实现多个池塘投料。本项目设定的投料能力为2 500 kg·h-1,以下电机参数选择均按此目标进行。
饲料集中供应设计,具有以下优点:1)输送距离远,加上中继站,输送距离可更远;2)可降低饲料运输和道路建设成本;3)投料面积可调,喷洒均匀;4)可自动用高压空气清洗管道,不会残留饲料;5)耐用、安全、易操作及环保等。
图1
2 饲料集中供应系统各子系统设计
2.1 饲料供料系统设计
图2
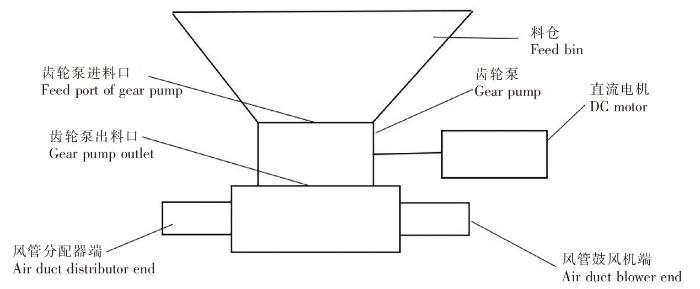
齿轮泵驱动电机功率N1计算式:
式(1)中:N1—电机驱动功率,W;P—泵出口压力,Pa;Q—齿轮泵流量,m3·s-1;η—齿轮泵效率。
由于颗粒饲料密度一般为1.0~1.3 g·cm-3,齿轮泵效率约为0.7~0.9,管道压力约为1.6×105 Pa,按照投料能力及齿轮泵效率取0.9代入进行计算,并考虑余量,因此驱动电机功率取150 W。本系统齿轮泵电机采用直流电机,选择电机功率为150 W,电压24 V,额定转速1 800 r·min-1。需要说明的是,实际系统可以根据投料能力的不同要求,选择相适应的齿轮泵及配套电机。
齿轮泵直流电机的速度调控通过控制电机的工作电压实现。电机工作电压通过PLC的脉冲宽度调制(Pulse width modulation,PWM)方法,可方便地控制负载端的平均电压,在脉冲的低电压趋近于0时,负载的平均电压与PWM的占空比成正比[11]。本系统使用S7-200PLC的PWM脉宽调制功能,通过PWM配置向导进行配置,周期为500 ms。电机转速可以根据实际需要在触摸屏上设置不同的挡位进行控制。本项目设置为3个挡位,对应PLC地址分别为M10.0、M10.1、M10.2,对应的占空比分别为0.3、0.5、1.0,通过PLC编程实现。
2.2 饲料风机输送系统选型
式(2)中:N2—电机驱动功率,W;Q1—系统工作风量,m3·min-1;Pm—管道总压力降,kPa。
为满足该项目设计的投料能力,根据式(2),并结合市场上常用的风机参数性能,本项目风机电机参数为:风机功率为7.5 kW,线电压为380 V,额定电流为15.5 A,额定转速为2 800 r·min-1。
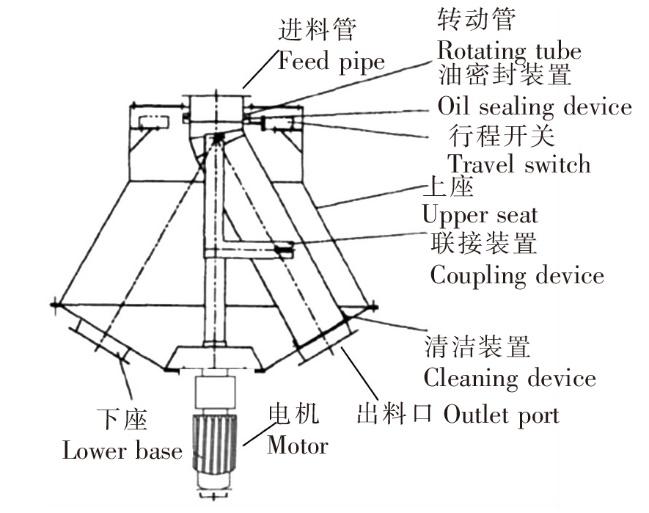
2.3 集中供料饲料分配系统选型设计
饲料分配系统采用旋转分配器。饲料风机输送系统输送过来的饲料进入旋转分配器上方的进料口,下部有多个出料口,每个出料口对应一个池塘,出料口可以根据需要进行定制,出于成本考虑,分配器结构采用如图3所示。为满足该项目设计的投料能力,该旋转分配器的动力使用单相交流电机,交流电机额定功率为550 W,额定电压为220 V,额定转速为1 400 r·min-1。交流电机的启动和停止由PLC进行控制。通过键套联接带动旋转管,实现旋转管进料口与下座出料口的匹配对接,分配器旋转对接定位由行程开关提供信号,发送给S7-200PLC,PLC发出信号对动力电机进行启停控制,从而实现定位对接。驱动电机位置在分配器的下方,将分配器装置外壳上部的进料管作为旋转轴心,导套套进进料管,联结装置的支座设计成圆台型,其斜边与水平面成一定夹角,该夹角与旋转管的倾角一致。该旋转分配器制造工艺及结构都比较简单,安装维护方便。若对管道密封性要求高,可以采用成本更高的带有风网和吸风装置的旋转分配器[14]。集中供应分配系统的电机,也可以使用步进电机,从而使分配器机械机构可以简化,定位更加精准。
图3
2.4 饲料抛料系统设计
每个池塘的饲料抛料系统由3个浮球、输送管道、抛料电动机、支架、抛料装置等组成,如图4所示。浮球的主要作用是确保抛料装置处于水面之上一定的距离,综合考虑成本及稳定性,设计采用3浮球结构。考虑到腐蚀等因素,支架和抛料装置上的抛料金属管采用不锈钢材料制作。
图4
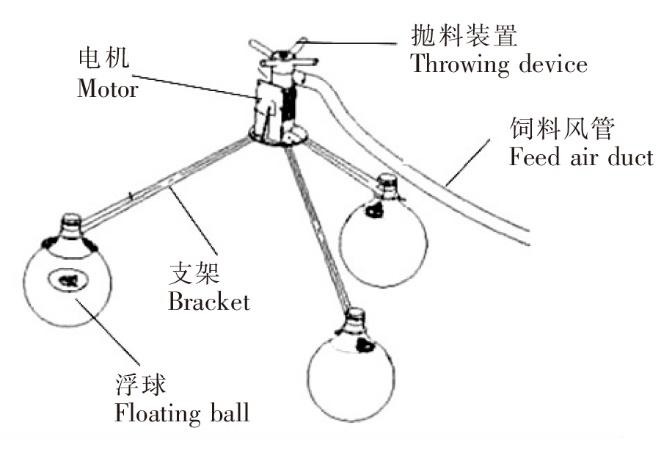
根据本项目的投料能力要求,参考行业的配置经验,电机采用单相交流电动机,电机额定功率为2.2 kW,额定转速为2 800 r·min-1,额定电压为220 V,额定电流为8.0 A。浮球直径约44 cm。该抛料电机只能按固定转速进行,对同一种饲料的抛料半径相对固定。如果抛料的范围固定,养殖生物觅食的空间也相应很小,而且拥挤觅食会造成局部严重缺氧,当溶解氧不足以维持生命之需时,养殖生物群会本能地逃离,造成饲料浪费和水质污染以及影响养殖生物的生长。因此,系统可以根据养殖对象的需求,通过增加1个变频器,借助变频器良好的调速性能,以很好地控制抛料电机的转速[15],从而更加灵活地控制抛料范围,但会增加购买变频器的成本。
2.5 饲料集中供应监控系统设计
饲料集中供应监控系统主要由信息采集系统、信息处理系统及人机界面(Human machine interface,HMI)组成。信息采集系统主要由各类传感器组成,本项目仅设有水温传感器,考虑到使用成本,采集的数据通过有线方式传送到控制器。基于水产养殖环境比较恶劣[16],出于可靠性的考虑,控制器选择西门子S7-200PLC(CPU226 DC/DC/DC型),变频器采用西门子MM420型。HMI采用北京昆仑通态公司的TPC7062KX触摸屏,组态软件采用MCGS7.7嵌入版。
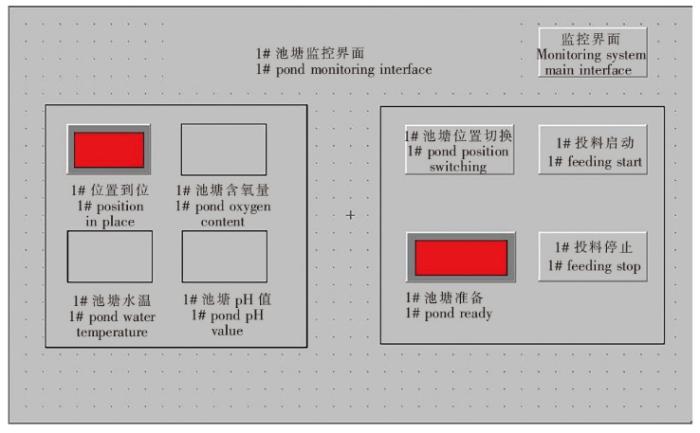
饲料集中供应监控系统PLC控制处理程序流程图,以1#池塘控制为例,如图5所示。根据实际投料情况,先将饲料放于料箱。PLC控制系统先判断集中投料系统是否处于初始状态,即料箱有料、各类传感器发回数据正常,然后在触摸屏上按下系统启动按钮。根据实际需要,选择需要投料的池塘。以选择1#池塘为例,1#池塘如果准备好,即水温等各类传感器发回的数据正常,则先选择供料挡位,然后启动1#池塘供料。投料完毕,则按下停止按钮,使得1#池塘投料参数复位。若所有池塘均投料完毕,则按下系统停止按钮,所有系统参数复位。在投料期间,任何时候出现紧急情况,都可以按下急停按钮,停止投料。饲料集中供应监控系统监控主界面如图6所示,以1#池塘为例,子系统监控界面如图7所示。启动屏幕前,需要进行登录认证。HMI监控界面可以根据用户需要进行功能增减。
图5
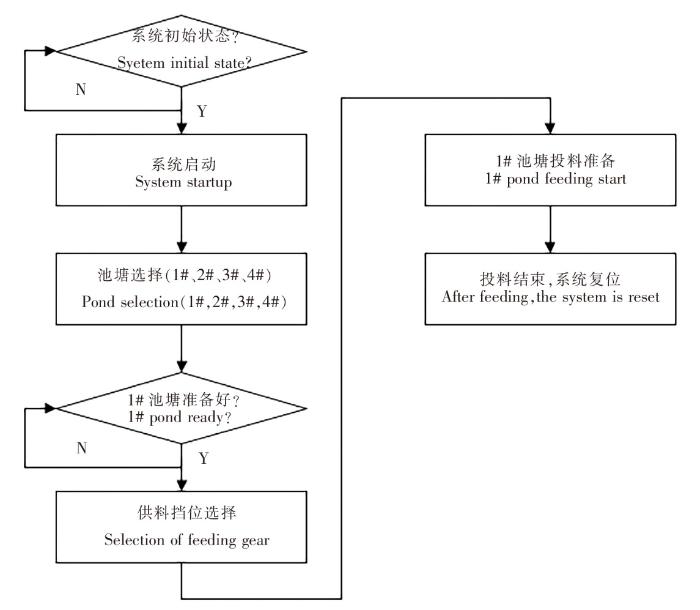
图6
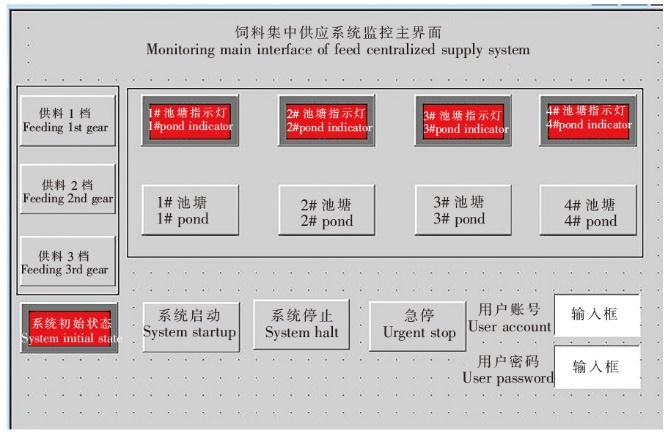
图6
饲料集中供应系统HMI主控界面
Fig.6
HMl main control interface of centralized feed supply system
图7
3 测试
受经费和场地条件不足等影响,饲料集中供应的机电系统和监控系统测试是分开的。首先,在厦门海洋职业技术学院的池塘进行机电系统的测试,将以上供料系统、输送系统、抛料系统等安装好,利用原有的简单的继电器电控系统对以上选择的机电系统进行测试,选用的是普通的颗粒状饲料,测试结果为:在输送饲料管道直径为50 mm条件下,本项目投料最大输送距离可达200 m以上,投料区域圆形直径60~80 m(投料面积可达4 000 m2以上),投料能力可以达到设计预期的2 500 kg·h-1。鉴于监控系统测试的主要是PLC的编程和触摸屏的通信,本项目监控系统安排在实验室进行测试。利用4个同类型但功率更小的电机对以上供料系统、输送系统、分配系统和抛料系统4个电机进行模拟测试,运行结果表明本系统设计的监控系统可以正常运行。需要说明的是,以上测试虽然没有完全和真实场景一致,但由于监控系统和控制的机电系统主要是受电机的控制,因此测试结果是可靠的。
4 结语
本项目的整体设备及监控系统在池塘和实验室的成功调试表明,该饲料集中供应系统可以满足中小养殖户对多池塘养殖无人值守和智能化自动投料控制的要求,具有较广阔的应用前景。但整个系统设计受成本限制,因而功能上不够全面。本项目作为智慧养殖业的一个子系统,未来可以通过增加各类水质检测及视觉传感器,比如pH值检测、含氧量检测等,通过智能无线传输设备,将数据传送给PLC,PLC通过智能无线传输设备,将信息发送到互联网云端,通过互联网无线通信设备,将数据发送至手机终端,用户可以在手机终端实时查看相关信息,并发出命令,对系统进行控制,这将极大地提高系统智能化水平及效率。
参考文献
新型变排量外啮合齿轮泵流量特性研究
[J].
齿轮泵具有结构紧凑、体积小、转速范围大和耐冲击性能强等优点,作为动力元件广泛应用于液压系统。然而,与柱塞泵和叶片泵相比,齿轮泵难以实现变量控制,限制了其应用范围。为此,提出一种变滑块位置-困油区域的齿轮泵变量方式。对变量齿轮泵进行理论分析,通过联合仿真和流场可视化仿真详细分析变量齿轮泵的特性;建立试验台对理论和仿真结果进行了验证。研究结果表明,通过改变变量模块位置,调整困油区域,齿轮泵排量可在88%~100%变化;研究工作将齿轮泵的变量设计提供帮助。
高密度养殖池塘自动气力投饲机的设计试验
[J].为解决池塘高密度养殖过程中的投饲机承载量小、投饲不均匀、投饲范围小、饲料利用率低等问题,提出一种基于气体输送原理的自动投饲机。根据其工作原理,对投饲机的供料系统、输送系统、抛料系统和控制系统进行了设计与分析,采用气力作为供料能源,管道作为输送机构,撒料盘作为抛料机构,西门子S7-200PLC作为系统控制单元。结果显示,该自动投饲机能同时满足6个池塘的投喂,并能单独控制,满足池塘的投饲需求;投饲距离达20 m,平均投饲速度400 kg/h,破碎率低于0.9%,基本满足设计要求。与传统池塘投饲机相比,该投饲机具有结构简单、操作方便,饲料不易破碎、饲料利用率高等特点,并可实现对投饲量精确调节与控制。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}